Optimize the motion and control of musculoskeletal models.
Moco employs the state-of-the-art direct collocation method to rapidly solve trajectory optimization problems. Predict walking in 30 minutes.
Moco feels familiar to OpenSim users, with XML/command-line, Matlab, Python, and C++ interfaces. Solve basic optimizations with very few lines of code.
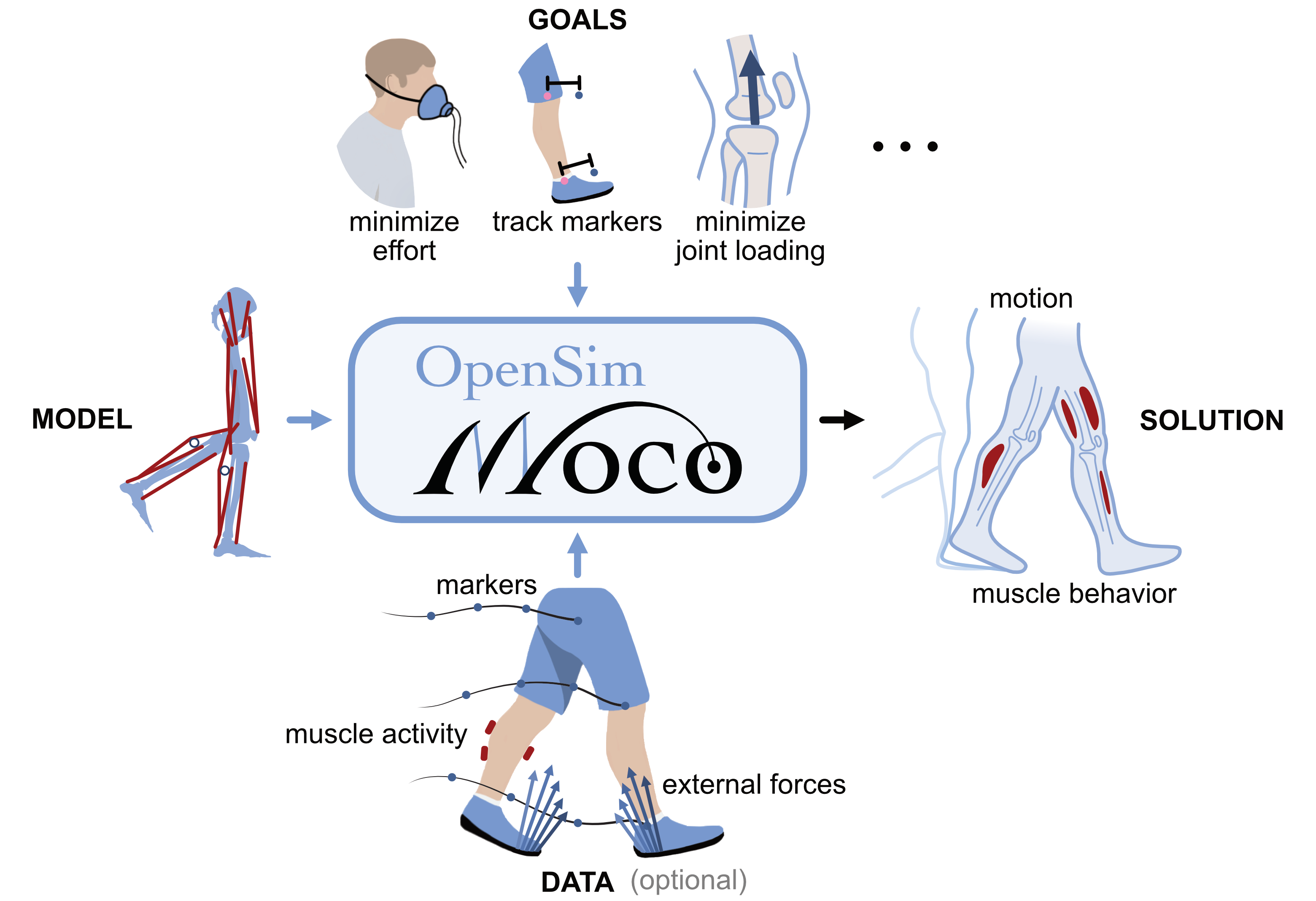
Solve motion tracking, motion prediction, and parameter optimization problems with a library of cost terms. Use almost any OpenSim model, even those with kinematic constraints.
