|
API
4.2
For MATLAB, Python, Java, and C++ users
|
|
API
4.2
For MATLAB, Python, Java, and C++ users
|
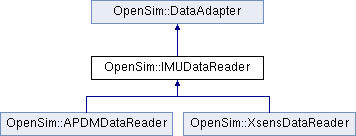
 Inheritance diagram for OpenSim::IMUDataReader:
Inheritance diagram for OpenSim::IMUDataReader:Public Member Functions | |
| IMUDataReader ()=default | |
| IMUDataReader (const IMUDataReader &)=default | |
| IMUDataReader (IMUDataReader &&)=default | |
| IMUDataReader & | operator= (const IMUDataReader &)=default |
| IMUDataReader & | operator= (IMUDataReader &&)=default |
| virtual | ~IMUDataReader ()=default |
| Public Member Functions inherited from OpenSim::DataAdapter | |
| virtual DataAdapter * | clone () const =0 |
| DataAdapter ()=default | |
| DataAdapter (const DataAdapter &)=default | |
| DataAdapter (DataAdapter &&)=default | |
| DataAdapter & | operator= (const DataAdapter &)=default |
| DataAdapter & | operator= (DataAdapter &&)=default |
| virtual | ~DataAdapter ()=default |
| DataAdapter::OutputTables | read (const std::string &dataSourceSpecification) const |
| Public interface to read data from a dataSourceSpecification, typically a file or folder. More... | |
| const std::shared_ptr< AbstractDataTable > | getDataTable (const OutputTables &tables, const std::string tableName) |
| Generic interface to retrieve a specific table by name from read result. More... | |
Static Public Member Functions | |
| static const TimeSeriesTable_< SimTK::Quaternion_< double > > & | getOrientationsTable (const DataAdapter::OutputTables &tables) |
| Custom accessors to retrieve tables of proper types without requiring users/scripters to cast. More... | |
| static const TimeSeriesTableVec3 & | getLinearAccelerationsTable (const DataAdapter::OutputTables &tables) |
| get table of LinearAccelerations as TimeSeriesTableVec3 More... | |
| static const TimeSeriesTableVec3 & | getMagneticHeadingTable (const DataAdapter::OutputTables &tables) |
| get table of MagneticHeading as TimeSeriesTableVec3 More... | |
| static const TimeSeriesTableVec3 & | getAngularVelocityTable (const DataAdapter::OutputTables &tables) |
| get table of AngularVelocity as TimeSeriesTableVec3 More... | |
| Static Public Member Functions inherited from OpenSim::DataAdapter | |
| static bool | registerDataAdapter (const std::string &identifier, const DataAdapter &adapter) |
| Register a concrete DataAdapter by its unique string identifier. More... | |
|
default |
|
default |
|
default |
|
virtualdefault |
|
protected |
create a map of names to TimeSeriesTables.
MetaData contains dataRate. The result can be passed to accessors above to get individual TimeSeriesTable(s) If a matrix has nrows = 0 then an empty table is created.
|
inlinestatic |
get table of AngularVelocity as TimeSeriesTableVec3
|
inlinestatic |
get table of LinearAccelerations as TimeSeriesTableVec3
|
inlinestatic |
get table of MagneticHeading as TimeSeriesTableVec3
|
inlinestatic |
Custom accessors to retrieve tables of proper types without requiring users/scripters to cast.
Scripting friendly get table of Orientations as TimeSeriesTableQuaternion
|
default |
|
default |