|
API 4.4.1-2022-10-19-2c4045e59
For MATLAB, Python, Java, and C++ users
|
|
API 4.4.1-2022-10-19-2c4045e59
For MATLAB, Python, Java, and C++ users
|
This class implements a 3 state (activation,fiber length and fiber velocity) acceleration musculo-tendon model that has several advantages over equilibrium musculo-tendon models: it is possible to simulate 0 activation, it requires fewer integrator steps to simulate, and physiological active force-length (with a minimum value of 0) and force velocity (with true asymptotes at the maximum shortening and lengthening velocities) curves can be employed. More...
 Inheritance diagram for OpenSim::Millard2012AccelerationMuscle:
Inheritance diagram for OpenSim::Millard2012AccelerationMuscle:Static Public Member Functions | |
Auto-generated functions | |
| static Millard2012AccelerationMuscle * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| Static Public Member Functions inherited from OpenSim::Muscle | |
| static Muscle * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "Muscle" More... | |
| Static Public Member Functions inherited from OpenSim::PathActuator | |
| static PathActuator * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "PathActuator" More... | |
| Static Public Member Functions inherited from OpenSim::ScalarActuator | |
| static ScalarActuator * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "ScalarActuator" More... | |
| Static Public Member Functions inherited from OpenSim::Actuator | |
| static Actuator * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "Actuator" More... | |
| Static Public Member Functions inherited from OpenSim::Force | |
| static Force * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "Force" More... | |
| Static Public Member Functions inherited from OpenSim::ModelComponent | |
| static ModelComponent * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "ModelComponent" More... | |
| Static Public Member Functions inherited from OpenSim::Component | |
| static Component * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| static const std::string & | getClassName () |
| This returns "Component" More... | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
| Register an instance of a class; if the class is already registered it will be replaced. More... | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
| Support versioning by associating the current Object type with an old name. More... | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
| Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. More... | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
| Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. More... | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
| Create a new instance of the concrete Object type whose class name is given as concreteClassName. More... | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. More... | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
| Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. More... | |
| static bool | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName, bool printFlagInfo=true) |
| Dump formatted property information to a given output stream, useful for creating a "help" facility for registered objects. More... | |
| static bool | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName, bool printFlagInfo=true) |
| Same as the other signature but the class name and property name are provided as two separate strings. More... | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
| Create an OpenSim object whose type is based on the tag at the root node of the XML file passed in. More... | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". More... | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
| Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. More... | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. More... | |
| static bool | isKindOf (const char *type) |
| Returns true if the passed-in string is "Object"; each Object-derived class defines a method of this name for its own class name. More... | |
| static void | setDebugLevel (int newLevel) |
| Set the amount of logging output. More... | |
| static int | getDebugLevel () |
| Get the current setting of debug level. More... | |
| static Object * | SafeCopy (const Object *aObject) |
| Use the clone() method to duplicate the given object unless the pointer is null in which case null is returned. More... | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). More... | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). More... | |
Auto-generated functions <br> | |
| static const std::string & | getClassName () |
| This returns "Millard2012AccelerationMuscle" More... | |
| Millard2012AccelerationMuscle * | clone () const override |
| Create a new heap-allocated copy of the concrete object to which this Object refers. More... | |
| const std::string & | getConcreteClassName () const override |
| Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string. More... | |
Additional Inherited Members | |
| Public Member Functions inherited from OpenSim::Muscle | |
| Public Member Functions inherited from OpenSim::PathActuator | |
| PathActuator * | clone () const override |
| Create a new heap-allocated copy of the concrete object to which this Object refers. More... | |
| const std::string & | getConcreteClassName () const override |
| Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string. More... | |
| Public Member Functions inherited from OpenSim::ScalarActuator | |
| Public Member Functions inherited from OpenSim::Actuator | |
| Public Member Functions inherited from OpenSim::Force | |
| Public Member Functions inherited from OpenSim::ModelComponent | |
| ModelComponent () | |
| Default constructor. More... | |
| ModelComponent (const std::string &aFileName, bool aUpdateFromXMLNode=true) | |
| Construct ModelComponent from an XML file. More... | |
| ModelComponent (SimTK::Xml::Element &aNode) | |
| Construct ModelComponent from a specific node in an XML document. More... | |
| virtual | ~ModelComponent () |
| Destructor is virtual to allow concrete model component cleanup. More... | |
| void | connectToModel (Model &model) |
| Connect this ModelComponent to its aggregate- a Model. More... | |
| const Model & | getModel () const |
| Get a const reference to the Model this component is part of. More... | |
| Model & | updModel () |
| Get a modifiable reference to the Model this component is part of. More... | |
| bool | hasModel () const |
| Does this ModelComponent have a Model associated with it? More... | |
| void | preScale (const SimTK::State &s, const ScaleSet &scaleSet) |
| Perform any computations that must occur before ModelComponent::scale() is invoked on all ModelComponents in the Model. More... | |
| void | scale (const SimTK::State &s, const ScaleSet &scaleSet) |
| Scale the ModelComponent. More... | |
| void | postScale (const SimTK::State &s, const ScaleSet &scaleSet) |
| Perform any computations that must occur after ModelComponent::scale() has been invoked on all ModelComponents in the Model. More... | |
| Public Member Functions inherited from OpenSim::Component | |
| Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. More... | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. More... | |
| Object & | operator= (const Object &aObject) |
| Copy assignment copies he base class fields, including the properties. More... | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. More... | |
| virtual bool | operator< (const Object &aObject) const |
| Provide an ordering for objects so they can be put in sorted containers. More... | |
| void | setName (const std::string &name) |
| Set the name of the Object. More... | |
| const std::string & | getName () const |
| Get the name of this Object. More... | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. More... | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. More... | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. More... | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object. More... | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. More... | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. More... | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. More... | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
| Get a const reference to a property by its index number, returned as an AbstractProperty. More... | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
| Get a writable reference to a property by its index number, returned as an AbstractProperty. More... | |
| bool | hasProperty (const std::string &name) const |
| Return true if this Object has a property of any type with the given name, which must not be empty. More... | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
| Get a const reference to a property by its name, returned as an AbstractProperty. More... | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
| Get a writable reference to a property by its name, returned as an AbstractProperty. More... | |
| template<class T > | |
| bool | hasProperty () const |
| Return true if this Object contains an unnamed, one-object property that contains objects of the given template type T. More... | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
| Get property of known type Property<T> as a const reference; the property must be present and have the right type. More... | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
| Get property of known type Property<T> as a writable reference; the property must be present and have the right type. More... | |
| bool | isObjectUpToDateWithProperties () const |
Returns true if no property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. More... | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. More... | |
| void | updateXMLNode (SimTK::Xml::Element &parent, const AbstractProperty *prop=nullptr) const |
| Serialize this object into the XML node that represents it. More... | |
| bool | getInlined () const |
| Inlined means an in-memory Object that is not associated with an XMLDocument. More... | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
| Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. More... | |
| std::string | getDocumentFileName () const |
| If there is a document associated with this object then return the file name maintained by the document. More... | |
| int | getDocumentFileVersion () const |
| If there is a document associated with this object then return its version number. More... | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) const |
| Write this Object into an XML file of the given name; conventionally the suffix to use is ".osim". More... | |
| std::string | dump () const |
| dump the XML representation of this Object into an std::string and return it. More... | |
| virtual bool | isA (const char *type) const |
| The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. More... | |
| const std::string & | toString () const |
| Wrapper to be used on Java side to display objects in tree; this returns just the object's name. More... | |
| PropertySet & | getPropertySet () |
| OBSOLETE: Get a reference to the PropertySet maintained by the Object. More... | |
| const PropertySet & | getPropertySet () const |
This class implements a 3 state (activation,fiber length and fiber velocity) acceleration musculo-tendon model that has several advantages over equilibrium musculo-tendon models: it is possible to simulate 0 activation, it requires fewer integrator steps to simulate, and physiological active force-length (with a minimum value of 0) and force velocity (with true asymptotes at the maximum shortening and lengthening velocities) curves can be employed.
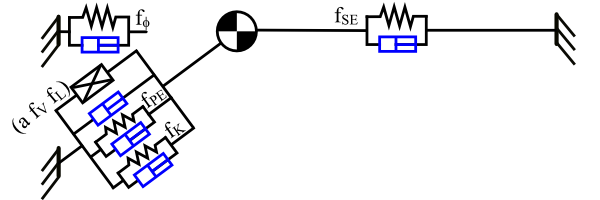
The dynamic equation of the mass, constrained to move in direction \( \hat{i} \) is given by the scalar equation:
\[ m \ddot{x} = F_{SE} - F_{CE} \cdot \hat{i} \]
The kinematic expression for the acceleration of the mass, \( \ddot{s} \), expressed in terms of the fiber length, \(l_{CE}\), and pennation angle \(\phi\) is
\[ \ddot{x} = \Big(\ddot{l}_{CE} \cos \phi - 2 \dot{l}_{CE}\dot{\phi}\sin\phi - \dot{\phi}^2 l_{CE} \cos \phi - \ddot{\phi} l_{CE} \sin \phi\Big) \]
The kinematic expression for the angular acceleration of the pennation angle can be found by taking the second derivative of the pennation constraint equation
\[ l_{CE} \sin \phi = h \]
which yields
\[ \ddot{\phi} = -\Big( \ddot{l}_{CE}\sin\phi + 2 \dot{l}_{CE} \dot{\phi} \cos\phi - \dot{\phi}^2 l_{CE} \sin \phi \Big) / \Big( l_{CE} \cos \phi \Big) \]
An expression for \( \ddot{l}_{CE}\) can be obtained by substituting in the equations \( \ddot{\phi} \) into the equation for \(\ddot{x}\) and simplifying:
\[ \ddot{l}_{CE} = \frac{1}{m} \Big( F_{SE} - F_{CE} \cdot \hat{i} \Big) \cos \phi + l_{CE} \dot{\phi}^2 \]
Notice that the above equation for \(\ddot{l}_{CE}\) has no singularities, provided that there are no singularities in \( F_{SE}\) and \( F_{M}\cdot\hat{i}\). The force the fiber applies to the tendon (in N), \(F_{CE}\cdot\hat{i}\), is given by (+'ve is tension)
\[ F_{CE} \cdot \hat{i} = f_{ISO}\Big(\mathbf{a} \mathbf{f}_L(\hat{l}_{CE}) \mathbf{f}_V(\frac{\hat{v}_{CE}}{v_{MAX}}) + \beta_{CE}\hat{v}_{CE} + \mathbf{f}_{PE}(\hat{l}_{CE})(1+\beta_{PE}\hat{v}_{CE}) - \mathbf{f}_K(\hat{l}_{CE})(1-\beta_{K}\hat{v}_{CE}) \Big) \cos \phi - f_{ISO} \Big( \mathbf{f}_{c\phi}(\cos \phi) (1- \beta_{c \phi} \frac{d}{dt}(\frac{l_{CE}\cos\phi}{l_{CE,OPT}\cos\phi_{OPT}})) \Big) \]
The force the tendon generates (in N) is given by (+'ve is tension)
\[ F_{SE} = f_{ISO} \mathbf{f}_{SE}(\hat{l}_{SE})(1+\beta_{SE}\hat{v}_{SE}) \]
Every elastic element ( \(\mathbf{f}_{PE}\), \(\mathbf{f}_{K}\), \(\mathbf{f}_{c\phi}\), and \(\mathbf{f}_{SE}\)) is accompanied by a non-linear damping element of a form that is identical to the damping found in a Hunt-Crossley contact model. Additionally a linear damping element, \(\beta_{CE}\hat{v}_{CE}\), is located in the fiber as in J.He et al. Damping is necessary to include in this model to prevent the mass from oscillating in a non-physiologic manner. Nonlinear damping Hunt-Crossley damping (where the damping force is scaled by the elastic force) has been chosen because this form of damping doesn't increase the stiffness of the system equations (because it is gradually turned on).
As with the Hunt-Crossley contact model, the force generated by the nonlinear spring and damper saturated so that it is greater than or equal to zero. This saturation is necessary to ensure that tension elements can only generate tensile forces, and that compressive elements only generate compressive forces. Note that the sign conventions have been chosen so that damping forces are generated in the correct direction for each element.
\begin{eqnarray*} (1+\beta_{PE}\hat{v}_{CE}) > 0 \\ (1-\beta_{K}\hat{v}_{CE}) > 0 \\ (1- \beta_{c \phi} \frac{d}{dt}(\frac{l_{CE}\cos\phi}{l_{CE,OPT}\cos\phi_{OPT}})) > 0 \\ (1+\beta_{SE}\hat{v}_{SE}) > 0 \end{eqnarray*}
For more information on these new terms please see the doxygen for FiberCompressiveForceLengthCurve, FiberCompressiveForceCosPennationCurve, and MuscleFirstOrderActivationDynamicModel.
Caution
The Millard2012AccelerationMuscle class is experimental and has not been extensively tested in all operational conditions.
Usage
Note that this object should be updated through the set methods provided. These set methods will take care of rebuilding the muscle correctly. If you modify the properties directly, the curve will not be rebuilt, and upon calling a function that requires a state an exception will be thrown because the muscle is out of date with its properties.
Note that this muscle does not currently implement the ignore_tendon_compliance flag, nor the ignore_activation_dynamics flag.
Nomenclature
Note that dot notation is used to denote time derivatives (units of \(m/s\) and \(m/s^2\) in this case), where as the hat symbol (as in \(\hat{l}\), \(\hat{v}\)) is used to denote time derivatives that have been scaled by a characteristic dimension (appear in units of \(1/s\) and \(1/s^2\) in this case)
References
Hunt,K., and Crossley,F. Coefficient of restitution interpreted as damping in vibroimpact. Transactions of the ASME Journal of Applied Mechanics, 42(E):440445, 1975.
J.He, W.S. Levine, and G.E. Leob."The Modelling of the Neuro-musculo-skeletal Control System of A Cat Hindlimb", Proceedings of the IEEE International Symposium on Intelligent Control, 1988.
|
inlineoverridevirtual |
Create a new heap-allocated copy of the concrete object to which this Object refers.
It is up to the caller to delete the returned object when no longer needed. Every concrete object deriving from Object implements this pure virtual method automatically, via the declaration macro it invokes (e.g., OpenSim_DECLARE_CONCRETE_OBJECT()). Note that the concrete class overrides modify the return type to be a pointer to the concrete object; that still overrides the base class method because the return type is covariant with (that is, derives from) Object.
Implements OpenSim::Muscle.
|
inlinestatic |
This returns "Millard2012AccelerationMuscle"
See getConcreteClassName() if you want the class name of the underlying concrete object instead.
|
inlineoverridevirtual |
Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string.
This is the string that is used as the tag for this concrete object in an XML file. Every concrete class derived from Object automatically overrides this method via the declaration macro it uses. See getClassName() to get the class name of the referencing (possibly abstract) class rather than the concrete object.
Implements OpenSim::Muscle.
|
inlinestatic |
For use in MATLAB and Python to access the concrete class.
Example: cObj = Millard2012AccelerationMuscle.safeDownCast(obj). This is equivalent to dynamic_cast<Millard2012AccelerationMuscle*>(obj) in C++.