|
API 4.4.1-2022-10-19-2c4045e59
For MATLAB, Python, Java, and C++ users
|
|
API 4.4.1-2022-10-19-2c4045e59
For MATLAB, Python, Java, and C++ users
|
This function is a muscle modeling utility class that simulates dynamics of muscle force development as a function of input excitation. More...
 Inheritance diagram for OpenSim::MuscleSecondOrderActivationDynamicModel:
Inheritance diagram for OpenSim::MuscleSecondOrderActivationDynamicModel:Static Public Member Functions | |
Auto-generated functions | |
| static MuscleSecondOrderActivationDynamicModel * | safeDownCast (OpenSim::Object *obj) |
| For use in MATLAB and Python to access the concrete class. More... | |
| Static Public Member Functions inherited from OpenSim::Object | |
| static void | registerType (const Object &defaultObject) |
| Register an instance of a class; if the class is already registered it will be replaced. More... | |
| static void | renameType (const std::string &oldTypeName, const std::string &newTypeName) |
| Support versioning by associating the current Object type with an old name. More... | |
| static const Object * | getDefaultInstanceOfType (const std::string &concreteClassName) |
| Return a pointer to the default instance of the registered (concrete) Object whose class name is given, or NULL if the type is not registered. More... | |
| template<class T > | |
| static bool | isObjectTypeDerivedFrom (const std::string &concreteClassName) |
| Return true if the given concrete object type represents a subclass of the template object type T, and thus could be referenced with a T*. More... | |
| static Object * | newInstanceOfType (const std::string &concreteClassName) |
| Create a new instance of the concrete Object type whose class name is given as concreteClassName. More... | |
| static void | getRegisteredTypenames (Array< std::string > &typeNames) |
| Retrieve all the typenames registered so far. More... | |
| template<class T > | |
| static void | getRegisteredObjectsOfGivenType (ArrayPtrs< T > &rArray) |
| Return an array of pointers to the default instances of all registered (concrete) Object types that derive from a given Object-derived type that does not have to be concrete. More... | |
| static bool | PrintPropertyInfo (std::ostream &os, const std::string &classNameDotPropertyName, bool printFlagInfo=true) |
| Dump formatted property information to a given output stream, useful for creating a "help" facility for registered objects. More... | |
| static bool | PrintPropertyInfo (std::ostream &os, const std::string &className, const std::string &propertyName, bool printFlagInfo=true) |
| Same as the other signature but the class name and property name are provided as two separate strings. More... | |
| static Object * | makeObjectFromFile (const std::string &fileName) |
| Create an OpenSim object whose type is based on the tag at the root node of the XML file passed in. More... | |
| static const std::string & | getClassName () |
| Return the name of this class as a string; i.e., "Object". More... | |
| static void | setSerializeAllDefaults (bool shouldSerializeDefaults) |
| Static function to control whether all registered objects and their properties are written to the defaults section of output files rather than only those values for which the default was explicitly overwritten when read in from an input file or set programmatically. More... | |
| static bool | getSerializeAllDefaults () |
| Report the value of the "serialize all defaults" flag. More... | |
| static bool | isKindOf (const char *type) |
| Returns true if the passed-in string is "Object"; each Object-derived class defines a method of this name for its own class name. More... | |
| static void | setDebugLevel (int newLevel) |
| Set the amount of logging output. More... | |
| static int | getDebugLevel () |
| Get the current setting of debug level. More... | |
| static Object * | SafeCopy (const Object *aObject) |
| Use the clone() method to duplicate the given object unless the pointer is null in which case null is returned. More... | |
| static void | RegisterType (const Object &defaultObject) |
| OBSOLETE alternate name for registerType(). More... | |
| static void | RenameType (const std::string &oldName, const std::string &newName) |
| OBSOLETE alternate name for renameType(). More... | |
Auto-generated functions <br> | |
| static const std::string & | getClassName () |
| This returns "MuscleSecondOrderActivationDynamicModel" More... | |
| MuscleSecondOrderActivationDynamicModel * | clone () const override |
| Create a new heap-allocated copy of the concrete object to which this Object refers. More... | |
| const std::string & | getConcreteClassName () const override |
| Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string. More... | |
Additional Inherited Members | |
| Public Member Functions inherited from OpenSim::Object | |
| virtual | ~Object () |
| Virtual destructor for cleanup. More... | |
| bool | isEqualTo (const Object &aObject) const |
| Equality operator wrapper for use from languages not supporting operator overloading. More... | |
| Object & | operator= (const Object &aObject) |
| Copy assignment copies he base class fields, including the properties. More... | |
| virtual bool | operator== (const Object &aObject) const |
| Determine if two objects are equal. More... | |
| virtual bool | operator< (const Object &aObject) const |
| Provide an ordering for objects so they can be put in sorted containers. More... | |
| void | setName (const std::string &name) |
| Set the name of the Object. More... | |
| const std::string & | getName () const |
| Get the name of this Object. More... | |
| void | setDescription (const std::string &description) |
| Set description, a one-liner summary. More... | |
| const std::string & | getDescription () const |
| Get description, a one-liner summary. More... | |
| const std::string & | getAuthors () const |
| Get Authors of this Object. More... | |
| void | setAuthors (const std::string &authors) |
| Set Authors of this object. More... | |
| const std::string & | getReferences () const |
| Get references or publications to cite if using this object. More... | |
| void | setReferences (const std::string &references) |
| Set references or publications to cite if using this object. More... | |
| int | getNumProperties () const |
| Determine how many properties are stored with this Object. More... | |
| const AbstractProperty & | getPropertyByIndex (int propertyIndex) const |
| Get a const reference to a property by its index number, returned as an AbstractProperty. More... | |
| AbstractProperty & | updPropertyByIndex (int propertyIndex) |
| Get a writable reference to a property by its index number, returned as an AbstractProperty. More... | |
| bool | hasProperty (const std::string &name) const |
| Return true if this Object has a property of any type with the given name, which must not be empty. More... | |
| const AbstractProperty & | getPropertyByName (const std::string &name) const |
| Get a const reference to a property by its name, returned as an AbstractProperty. More... | |
| AbstractProperty & | updPropertyByName (const std::string &name) |
| Get a writable reference to a property by its name, returned as an AbstractProperty. More... | |
| template<class T > | |
| bool | hasProperty () const |
| Return true if this Object contains an unnamed, one-object property that contains objects of the given template type T. More... | |
| template<class T > | |
| const Property< T > & | getProperty (const PropertyIndex &index) const |
| Get property of known type Property<T> as a const reference; the property must be present and have the right type. More... | |
| template<class T > | |
| Property< T > & | updProperty (const PropertyIndex &index) |
| Get property of known type Property<T> as a writable reference; the property must be present and have the right type. More... | |
| bool | isObjectUpToDateWithProperties () const |
Returns true if no property's value has changed since the last time setObjectIsUpToDateWithProperties() was called. More... | |
| void | readObjectFromXMLNodeOrFile (SimTK::Xml::Element &objectElement, int versionNumber) |
| We're given an XML element from which we are to populate this Object. More... | |
| virtual void | updateFromXMLNode (SimTK::Xml::Element &objectElement, int versionNumber) |
| Use this method to deserialize an object from a SimTK::Xml::Element. More... | |
| void | updateXMLNode (SimTK::Xml::Element &parent, const AbstractProperty *prop=nullptr) const |
| Serialize this object into the XML node that represents it. More... | |
| bool | getInlined () const |
| Inlined means an in-memory Object that is not associated with an XMLDocument. More... | |
| void | setInlined (bool aInlined, const std::string &aFileName="") |
| Mark this as inlined or not and optionally provide a file name to associate with the new XMLDocument for the non-inline case. More... | |
| std::string | getDocumentFileName () const |
| If there is a document associated with this object then return the file name maintained by the document. More... | |
| int | getDocumentFileVersion () const |
| If there is a document associated with this object then return its version number. More... | |
| void | setAllPropertiesUseDefault (bool aUseDefault) |
| bool | print (const std::string &fileName) const |
| Write this Object into an XML file of the given name; conventionally the suffix to use is ".osim". More... | |
| std::string | dump () const |
| dump the XML representation of this Object into an std::string and return it. More... | |
| virtual bool | isA (const char *type) const |
| The default implementation returns true only if the supplied string is "Object"; each Object-derived class overrides this to match its own class name. More... | |
| const std::string & | toString () const |
| Wrapper to be used on Java side to display objects in tree; this returns just the object's name. More... | |
| PropertySet & | getPropertySet () |
| OBSOLETE: Get a reference to the PropertySet maintained by the Object. More... | |
| const PropertySet & | getPropertySet () const |
This function is a muscle modeling utility class that simulates dynamics of muscle force development as a function of input excitation.
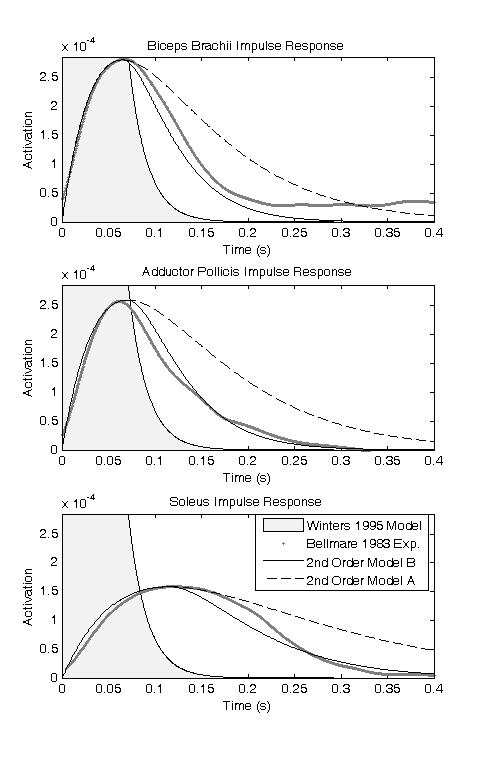
Though it has been long been assumed that a second-order, critically damped filter models the twitch response of muscle very accurately (Bellmare et al.) first order models have persisted in the literature. Zajac originally chose to use first order, rather than second order equations in an effort to reduce simulation times. First order activation dynamics were later popularized in two influential muscle modeling papers by Winters in 1995, and later by Thelen in 2003. Computing power is far greater today than it was at the time Zajac wrote his influential muscle modeling paper, and so it makes sense to include activation dynamics that more closely match the experimental literature.
The figure shows that there are very large differences in the impulse response between a first order system (filled gray area), and Bellmare et al.'s experimental data (thick gray line). The first order system has an instantaneous rise time, reaches a peak value when the impulse terminates (in 0 time). Additionally the impulse response of the second order system is orders of magnitude higher than the second order system (peaking at a value of just under 0.01), and so, its peak is not shown in the figure. The second order system peaks at the same time as Bellmare et al.'s experimental data, and then slowly decays. These plots suggest that a second order system decays far slower than the experiments indicate.
The quality of match between the second order model and the experimental data can be improved by having separate time constants for rising ( \(\dot{a} > 0\)) and falling ( \(\dot{a} < 0\)). This small change can be easily incorporated into a canonical second order ODE of a damped system with a forced input where \(a\) is activation, \(\zeta\) is damping, \(\omega\) is the natural frequency of the system, \(\mu\) is excitation (bounded by 0 and 1).
\[ \ddot{a} + 2 \zeta \omega \dot{a} + \omega^2 a = \omega^2\mu \]
For a critically damped system \(\zeta = 1\). To obtain a quicker rate of decay a the value of \(\omega\) changes depending on the sign of \(\dot{a}\):
if \(\dot{a}>0\)
\[ \omega = \frac{1}{T} \]
else if \(\dot{a}<0\)
\[ \omega = \frac{2}{T} \]
where \( T \) is the contraction time of the muscle. Values of \( T \) vary from muscle to muscle, depending mainly on their fiber composition.
Although the above second order system approximates the twitch response of muscle very well, it has a lower bound of 0. The conventional muscle model formulation requires that activation smoothly approach a lower bound that is above zero. This can be achieved by rescaling activation, and the lower bound:
\[ \hat{a} = \frac{a}{1-a_{min}} \]
\[ \hat{a}_{min} = \frac{a_{min}}{1-a_{min}} \]
Substituting in the rescaled activation and lower bound into the second order system yields
\[ \ddot{a}+2\zeta\omega\dot{a}+\omega^2(\hat{a}-\hat{a}_{min})=\omega^2\mu \]
This is the activation dynamic equation that this class implements as it matches Bellmare et al.'s experimental data quite well, and has a user-settable lower bound.
Default
The default time to peak (or twitchTimeConstant) is 0.050 seconds. This is on the faster end of skeletal muscles. Bellmare et al. reported values of 0.0657, 0.071 and 0.116 for the biceps brachii, adductor pollicis, and the soleus respectively.
References
Bellmare, F., Woods, JJ., Johansson, R., and Bigland-Ritchie, B. (1983). Motor-unit discharge rates in maximal voluntary contractions of three human muscles. J. Neurophysiology(50), pp. 1380-1392.
Thelen, DG.(2003), Adjustment of Muscle Mechanics Model Parameters to Simulate Dynamic Contractions in Older Adults. ASME Journal of Biomechanical Engineering (125).
Winters, JM. (1995). An Improved Muscle-Reflex Actuator for Use in Large-Scale Neuromusculoskeletal Models. Annals of Biomedical Engineering (25), pp. 359-374.
Zajac, FE (1989). Muscle and Tendon: Properties, Models, Scaling and Application to Biomechanics and Motor Control. Critical Reviews in Biomedical Engineering (17), pp. 359-410.
Computational Cost Details All computational costs assume the following operation costs:
Operation Type : #flops
+,-,=,Boolean Op : 1
/ : 10
sqrt: 20
trig: 40
|
inlineoverridevirtual |
Create a new heap-allocated copy of the concrete object to which this Object refers.
It is up to the caller to delete the returned object when no longer needed. Every concrete object deriving from Object implements this pure virtual method automatically, via the declaration macro it invokes (e.g., OpenSim_DECLARE_CONCRETE_OBJECT()). Note that the concrete class overrides modify the return type to be a pointer to the concrete object; that still overrides the base class method because the return type is covariant with (that is, derives from) Object.
Implements OpenSim::Object.
|
inlinestatic |
This returns "MuscleSecondOrderActivationDynamicModel"
See getConcreteClassName() if you want the class name of the underlying concrete object instead.
|
inlineoverridevirtual |
Returns the class name of the concrete Object-derived class of the actual object referenced by this Object, as a string.
This is the string that is used as the tag for this concrete object in an XML file. Every concrete class derived from Object automatically overrides this method via the declaration macro it uses. See getClassName() to get the class name of the referencing (possibly abstract) class rather than the concrete object.
Implements OpenSim::Object.
|
inlinestatic |
For use in MATLAB and Python to access the concrete class.
Example: cObj = MuscleSecondOrderActivationDynamicModel.safeDownCast(obj). This is equivalent to dynamic_cast<MuscleSecondOrderActivationDynamicModel*>(obj) in C++.